Product

Autonomous Icing Protection System
Icing Protection Solution for commercial UAVs
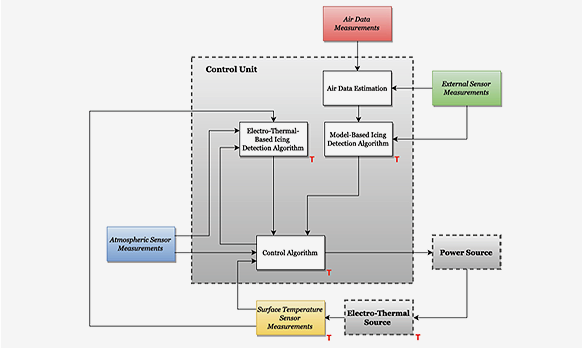
Overall architecture of the solution is one atmospheric sensor package; one set of air data measurements; one set of pressure sensor measurements; one power source; and one air data estimation, for the aircraft in its entirety, but that all the other components (internal and external to the control unit) have duplicates, as each wing has its own electro-thermal source and therefore require individual feedback and algorithms for optimal control. Several sensor measurement blocks provide measurements to the control unit. A brief explanation follows and a clarifying diagram of the IPS as shown in integrated onto an UAV platform.
01
The external sensor measurements includes; an IMU1 supplying measurements of the specific force and angular rate of the aircraft; a pitot-static tube providing measurements of the relative velocity in the longitudinal axis of the aircraft; an engine speed sensor; GNSS-based ground velocity measurements; and control surface input measurements
02
The air data measurements signify a number of located sensors providing pressure measurements and secondary temperature measurements
03
The atmospheric sensor measurements provides both ambient temperature and relative humidity measurements
04
The surface temperature sensor measurements is comprised of a sensor array embedded in each wing. These sensor arrays supply the control unit with temperature measurements of the electro-thermal sources (one is applied to each wing)